Core V 1
Description générale
Core est un robot chef d’orchestre. Il donne le tempo et la partition à toutes les autres créatures artificielles du Labo.
Core, le cerveau du GRIM.
Description technique
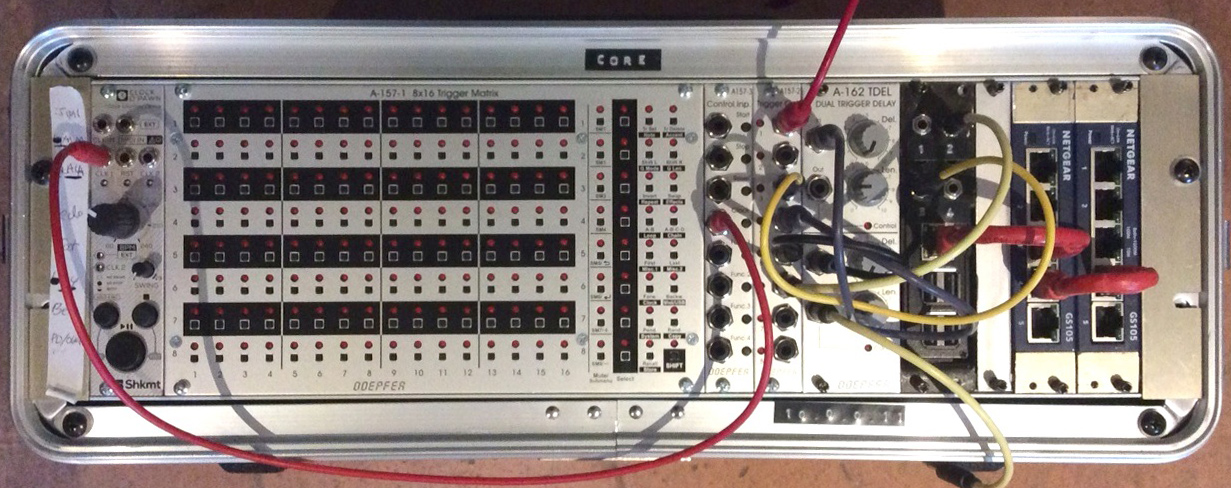
Core est un petit rack format eurorack équipé de :
- Une clock
- Un sequenceur de trig
- Un utilitaire de trig (retard et trig to gate)
- Un serveur OSC
- Un switch ethernet
Ses fonctions principales sont :
- Composer un rythme qui peut être distribué aux machines du GRIM en Trig (minijack) ou en OSC (RJ45)
- Connecter toutes les machines équipées d’une interface réseau sur un même réseau.
Intégration au réseau
Voilà le schéma du réseau :
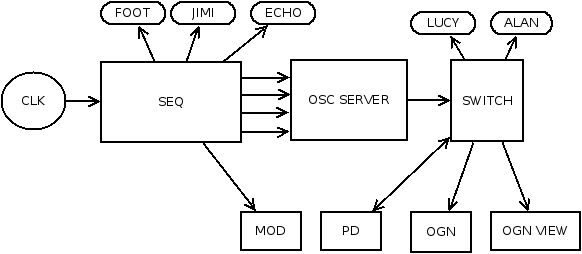
- Foot, Jimi et Écho sont des robots en arduino avec un entrée gate
- Lucy et Alan des robots qui fonctionnent en raspberry ou PC.
- SEQ = séquenceur de trig doepfer A 157-1/2/3
- CLK = générateur d’horloge Clock O’Pawn Shakmat Modular
- OSC SERVEUR = Raspberry Pi équipé d’une interface d’entrée 4 trigs
- SWITCH = Gigabit RJ45 Netgear ProSAFE GS108GE 8 ports
- Mod = Synthé modulaire
- PD = pure date sur un Raspberry pour synthèse sonore
- OGN/OGN VIEW = Sur un PC + un Raspberry, OGNON, logiciel de création d’animation en temps réel.
Patch et cablage des modules
Patch externe
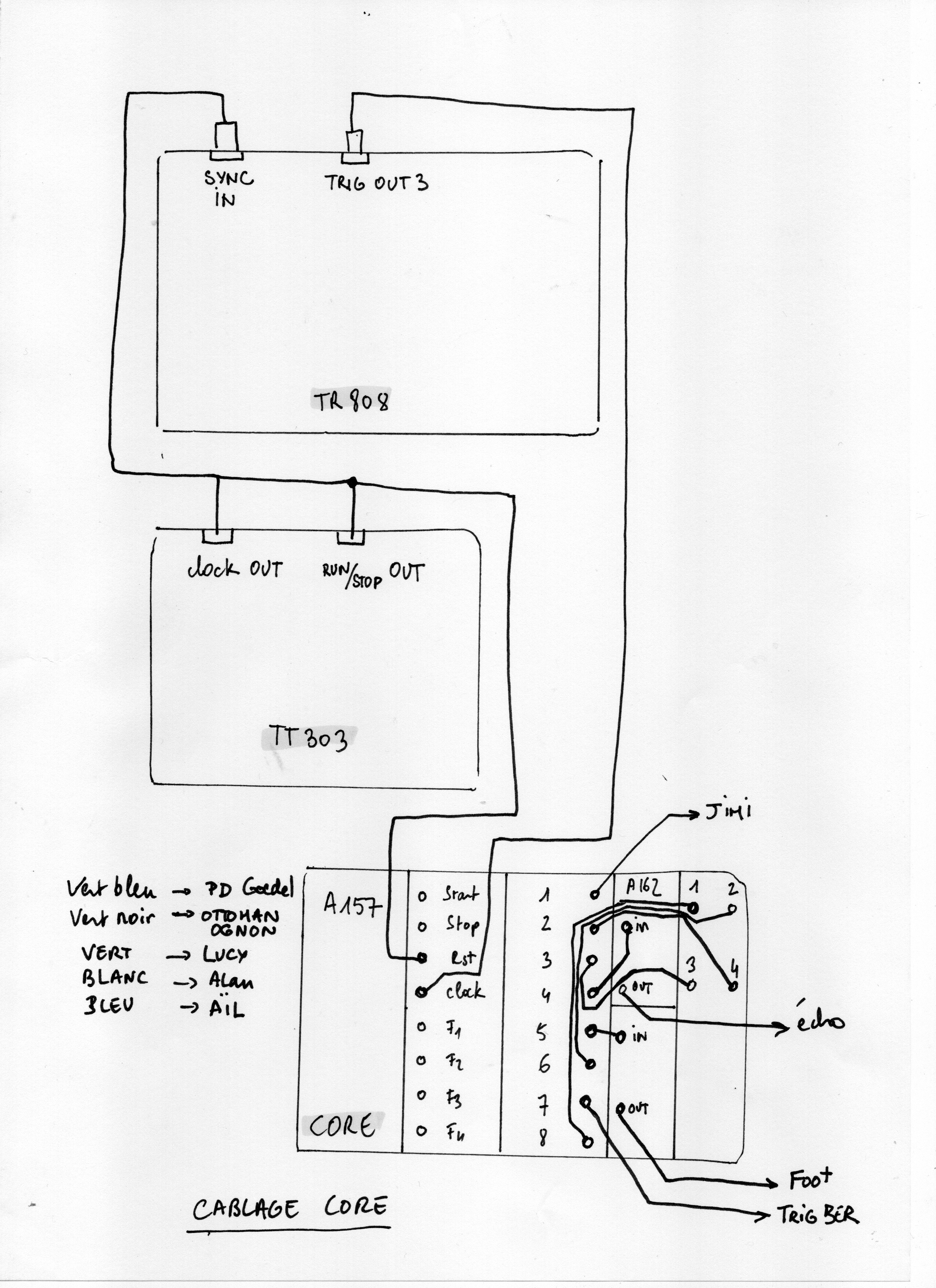
Dans l’acte 3, Core intervient dans un environnement de production musicale dont la partie rythmique est prise en charge par une TR 808 (boite à Rythme) et une TT 303 (Bass Line, clone de TB 303). Dans cette configuration, La TT 303 est maitre.
- TT 303 clock out —> TR 808 Sync clock in (SYNC-DIN 5 broches / Sync ext sur TR 808)
- TT 303 run out —> TR 808 Sync reset in (SYNC-DIN 5 broches / Sync ext sur TR 808)
Patch Entrées
Core reçoit l’horloge directement de la sortie Trig 3 de la TR 808 et le reset de la TT 303. (Le générateur d’horloge n’est utilisé qu’en stand alone pour test ou dépannage.)
- TR 808 out trig 3 —> in seq click in
- TT 303 run out —> in seq reset
Patch OSC
Le server OSC (raspberry) dispose de 4 entrées trig (mini-jack) ainsi que d’une sortie ethernet (RJ45). Son rôle est de dispatcher les trigs à différentes adresses IP sous forme de messages OSC via les deux switch.
- seq out trig 2 —> in RPI 4 —> Alan talk_alone
- seq out trig 3 —> in RPI 3 —> Alan lalala
- seq out trig 6 —> in RPI 2 —> Lucy
- seq out trig 8 —> in RPI 1 —> Pure Data
- Les deux switchs sont connectés entre eux
- Le serveur OSC est connecté à un des deux switchs
- Les machines du GRIM sont connectées indifféremment à l’un des deux switchs.
Patch de l’interface trig/RPI
Le GRIM a conçu une interface pour ajouter les entrées trig 10v au raspberry. Pour plus d’informations concernant le circuit électronique, consulter le chapitre interface Raspberry/Arduino/trig dans cette note technique.
VCC : PIN1 (3.3V)
GND : PIN9 (GND)
RPI 1 : PIN7 GPIO04
RPI 2 : PIN11 GPIO17
RPI 3 : PIN13 GPIO27
RPI 4 : PIN15 GPIO22
GND : PIN 39 (GND)
Patch analogique
- seq out trig 1 —> A162 doepfer (trig to gate) —> Jimi (gate)
- seq out trig 4 —> Écho (trig)
- seq out trig 5 —> A162 doepfer (trig to gate) —> Foot (gate)
- seq out trig 7 —> Synthé modulaire (trig)
note : l’insertion d’un module trig to gate A162 doepfer à résolu un problème de déclenchement (impulsion trop courte) de certains robots basé sur un module Arduino.
Intégration
Petit fly rack 3U avec une pochette intégrée dans laquelle :
- cables RJ45
- 2 alim netgear
- 1 alim rbpi
- 1 alim modulaire
- La doc
Software
Le serveur écoute les trigs sur ses entrées et envoie les messages correspondants sur sa table de dispatch. Voir le code
Table de dispatch
indique quel message envoyer à quelle adresse ip en fonction des trigs qu’il reçoit
Par exemple : dispatch_table.py
Comment mettre à jour la table de dispatch
Pour se connecter en ssh à core
ssh pi@core.local ou ssh pi@10.0.0.11
mot de passe : SIMPLE_GRIM_MDP
Puis il faut modifier ~/dispatch_table.py
Puis il faut sudo reboot
Notes techniques
Le programme est lancé au demarrage du raspberry avec une commande dans /etc/rc.local
Améliorations envisagées
- Centraliser les alims
- Voyant quand le serveur OSC est en route (boffement utile)
- 2 sorties trig pour le serveur OSC
- Le serveur écoute les messages OSC de type
/trig/ net envoie un trig sur la sortien. - Bug : Core ne peut pas recevoir deux trigs à la fois
- Bug : Core lag et saute donc des pas quand il cherche à envoyer de l’osc à un ordi éteint.
Moment envisagé pour la construction et/ou les améliorations.
Du 15/3/2019 au 31/3/2019 à Graulhet puis résidence 104 du 15 au 21 avril 2019
note concernant l’utilisation du PATHS by RYO (abandonné)
A une certaine phase de développement du robot, nous avons été amené à télécommander le patch des sorties trig du séquenceur avec un module PATHS de chez RYO. Ce module permet de basculer l’envoi de trig au raspberry. En position 1 (LED allumée en haut) le trig Pure data venant de Core est envoyée vers le raspberry, le trig d’Alan est envoyé vers une sortie vide. En position 2 (LED allumée un cran plus bas) le trig Pure data est envoyé vers une sortie vide venant de Core, le trig d’Alan est envoyée vers le raspberry. Pour passer de la position 1 à 2 et inversement, il suffit d’appuyer sur le bouton FWD. A l’avenir, il suffira d’envoyer un trig dans l’entrée FWD du switch.
Les connexions du switch sont les suivantes
Le bouton steps est sur la position 2
Switching
- 1 2 PD/PD
- 0 0
- 3 0 AL/
- 0 4 /AL
Avec :
- 1 Pure Data in
- 2 Pure Data out
- 3 Alan in
- 4 Alan out