Toto V0.1
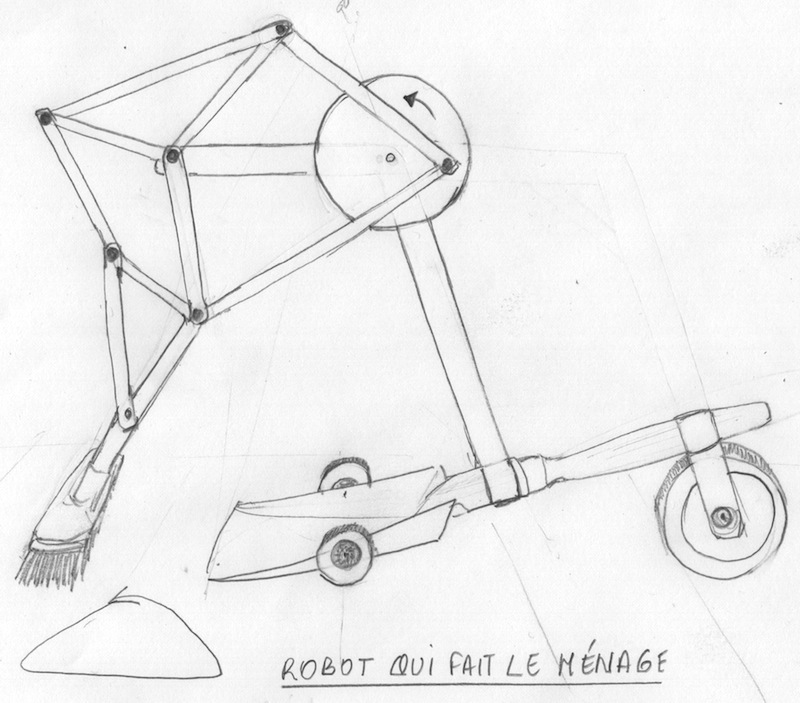
Esthétique, allure du robot
Toto est un véhicule autonome équipé d’une pelle et d’une balayette
Hypothèses de construction, description technique
Une pelle du commerce est aménagée avec deux roues libres à l’avant et une roue entrainée et orientée par deux servos à l’arrière. Le mouvement de balayette est un linkage de Jansen entrainé par un troisième servo. Les trois servos sont commandés par un arduino auquel plusieurs capteurs sont connectés :
- module éviteur d’obstacle TL70A
- module détecteur de poussière GROVE 101020012
- module GPS
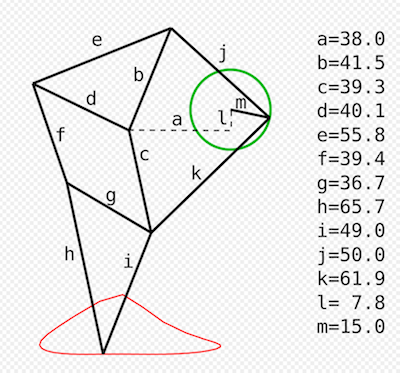
Mécanisme de jansen : cotes
Moment envisagé pour la construction
En cours.