Klan V 0.2
Description générale
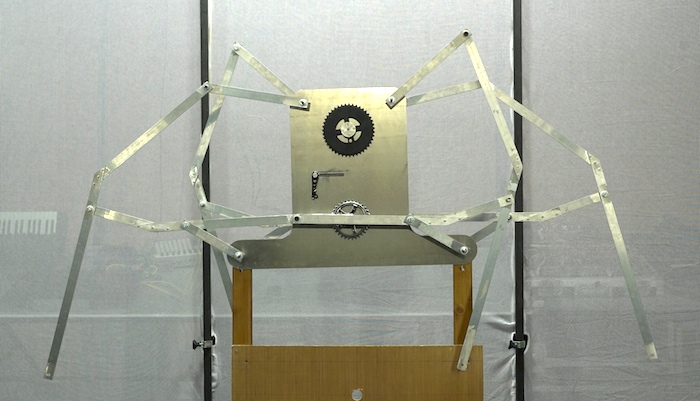
Klan est un projet de robot doté de capacités de locomotion évoluées qui lui permettront de se déplacer dans des environnements encombrés. Il sera équipé de 8 jambes actionnées par deux moteurs indépendants. Dans sa version actuelle, Klan est un prototype doté uniquement de 4 jambes et d’un seul moteur et ne peut se déplacer en autonomie. Il apparaît dans le spectacle comme “un robot en cours d’élaboration”
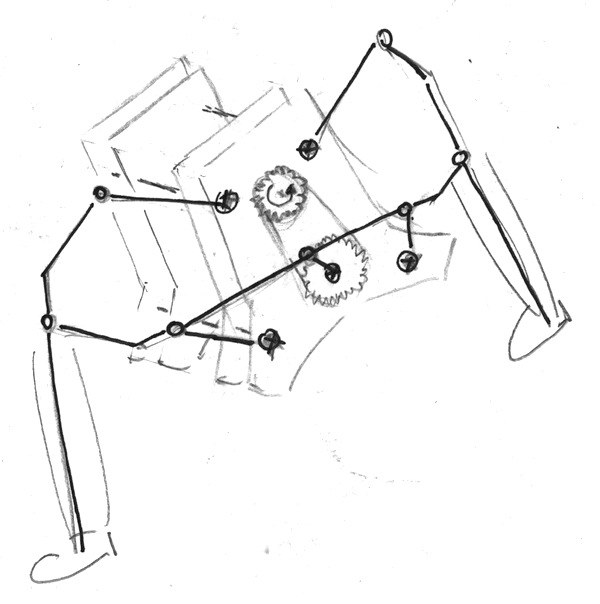
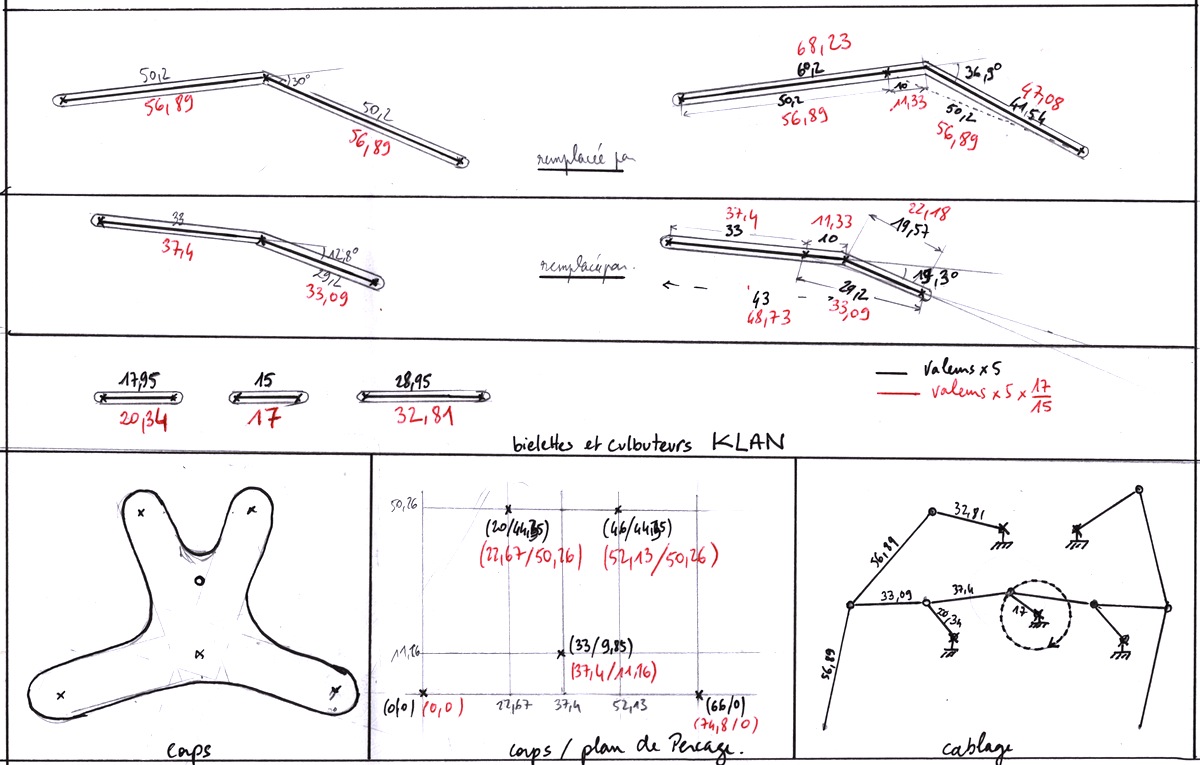
Sa structure s’inspire du (mécanisme de Klann/Klann’s linkage), développée par Joe Klann en 1994.
Animation répétitive du mécanisme de Klan
Allure
Klan V 0.2 mesure environ 1,4m de haut pour 1,2m de long et 0,8m de large. Sa structure ouverte et sans carter laisse apparaître l’intégralité du mécanisme. Une version plus petite de Klan est à l’étude et devrait mesurer 70cm x 60cm x 50cm.
Matériaux
Parties mobiles en Aluminium. Rondelle en Téflon PTFE et Visserie BTR M10 avec écrous Stop Motorisation CC, transmission vélo-hacking et commande par arduino + schield moteur.
Description technique
Le mécanisme d’une jambe se compose d’un segment qui entre en contact avec le sol, d’une manivelle, de deux culbuteurs, et deux biellettes tous reliés par des liaisons pivots.
Dans notre adaptation, la rotation des pivots s’effectue grace à des rondelles en Téflon, sauf pour les axes moteur, fixés sur des paliers appliqués à la structure du corps.
Liste matériel
Mécanique
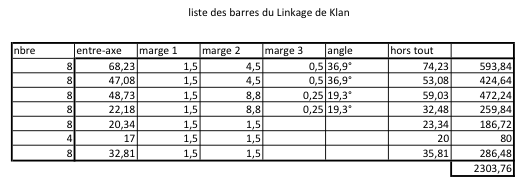
Bielles
- Plat Alu : 40mmx5mm (x20m)

Structure
4 plaques alu ep 5mm selon dessin (aquabrasion)
Visserie
- Boulon M10 40mmm (x26)
- écrou M10 Stop (x100)
- rondelle teflon 10/25 (x112)
- tige filetée M10 (x4m)
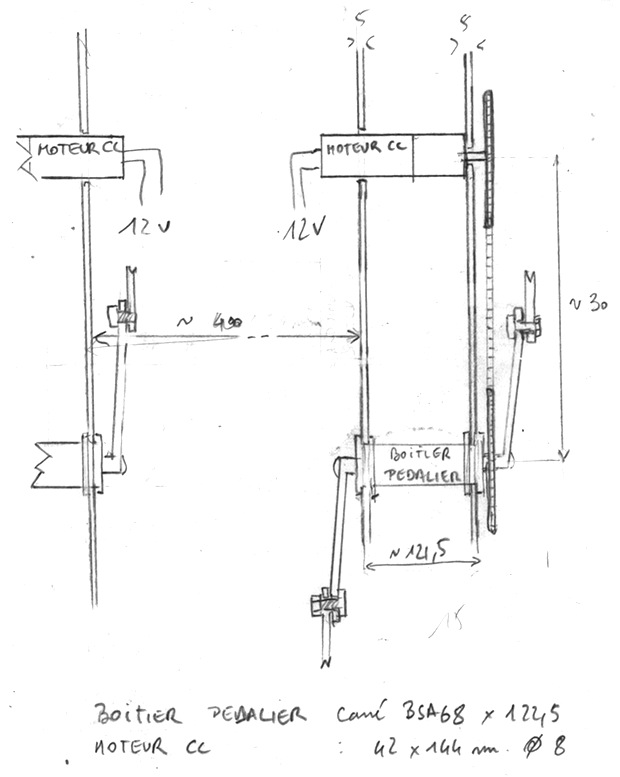
vélo-hacking / transmission
- 2 manivelles avec plateaux 32 dents
- 2 boitiers + axe pedalier
- 2 plateaux 44 dents
- 2 tendeurs de chaines
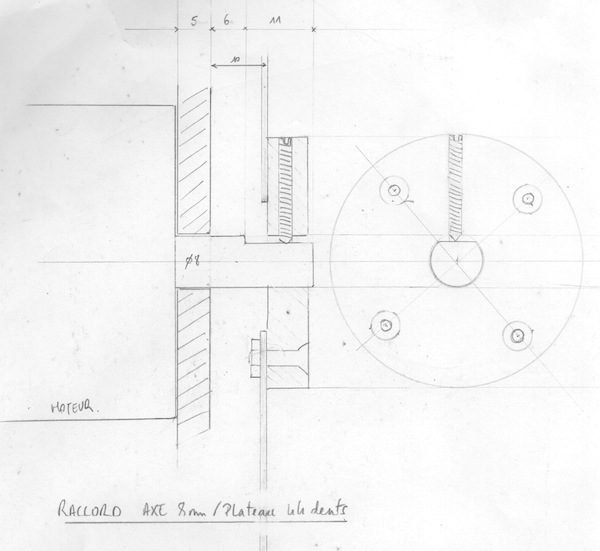
- pièces à créer : raccord axe moteur 8mm + plateau 44 dents
- Chaines
-
2 entretoises 68mm
- pedalier (manivelles:170mm)
Pièces à créer : raccord axe moteur 8mm + plateau 44 dents
Electronique
- Arduino UNO
- Shield controleur
- Moteur CC (vitesse réglable entre 40 et 400 avec l’arduino)
- Bouton Stop Urgence
Software
Proposition en pseudo-code pour le programme de Klan
// constantes
constante ECARTEMENT_DES_JAMBES = 75 //cm
normalisation_vitesse = vitesse max de klan en m/s divisé par 400
// reglages
variable vitesse
variable vitesse_normalisee
variable longueur_d_un_aller
variable vitesse max //entre 0 et 400
variable pause_avant_de_tourner
variable pause_apres_avoir_tourne
variable rayon_du_demi_tour
variable moment_de_la_pause //en pourcentage d'un aller
variable duree_pause_pour_reflechir
fonction arreter():
Pour i compris entre vitesse et 0
regler_vitesse_jambe_gauche(i)
regler_vitesse_jambe_droite(i)
fonction faire_une_pause_pour_reflechir():
freiner()
attendre(duree_pause_pour_reflechir)
demarer()
fonction demarer():
Pour i compris entre 0 et vitesse
regler_vitesse_jambe_gauche(i)
regler_vitesse_jambe_droite(i)
fonction tourner_a_gauche(rayon):
longueur_demi_tour_gauche = PI * rayon
longueur_demi_tour_droit = PI * (rayon + ECARTEMENT_DES_JAMBES)
vitesse_jambe_droite = vitesse
vitesse_jambe_gauche = vitesse_jambe_droite * longueur_demi_tour_gauche / longueur_demi_tour_droit
duree_totale = longueur_demi_tour_gauche / vitesse_jambe_gauche
regler_vitesse_jambe_gauche(vitesse_jambe_gauche)
regler_vitesse_jambe_droite(vitesse_jambe_droite)
attendre(duree_totale)
freiner()
fonction faire_les_cent_pas :
vitesse_normalisee = vitesse*normalisation_vitesse
duree = longueur_d_un_aller / vitesse
boucle infini :
demarer()
attendre(duree*((moment_de_la_pause)/100)
faire_une_pause_pour_reflechir()
attendre(duree*(1-(moment_de_la_pause)/100)
areter()
attendre(pause_apres_avoir_tourne)
tourner_a_gauche(rayon_du_demi_tour)
attendre(pause_apres_avoir_tourne)
fonction boucle()
faire_les_cent_pas()
Améliorations envisagées
Fabriquer une version de Klan plus petit capable de se mouvoir en autonomie
Moment envisagé pour la construction et/ou les améliorations.
Construction mécanisme du 15/3/2019 au 31/3/2019 à Graulhet. Améliorations : 2020/2021