Turc V 1.0
Description générale
Turc est un robot qui sait jouer au morpion, mais qui n’aime pas perdre.
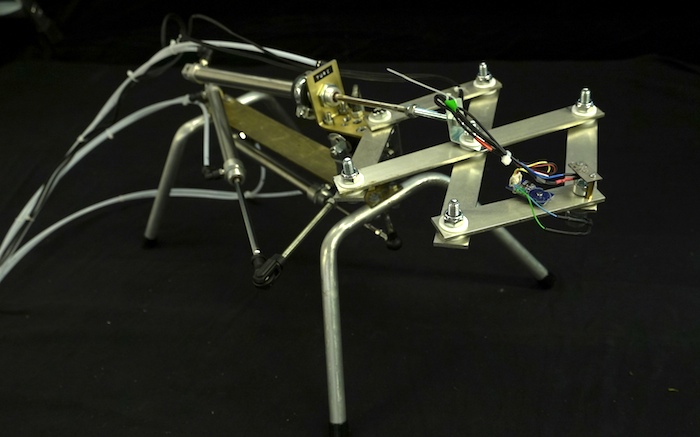
Allure
C’est un quadripède avec un bras articulé au bout duquel est fixé un électroaimant qui lui permet de se saisir de pièces métalliques.
Matériaux
- Parties fixes et mobiles en Aluminium. Rondelle en Téflon PTFE et Visserie BTR M10 avec écrous Stop
- Verins pneumatiques
- articulations sur paliers et rotules
Note sur l’entretien des verins.
Il convient de décrasser régulièrement les verins à l’alcool à 90° puis de regraisser très légèrement par exemple avec de la graisse de nez.
![]() Attention : pensez à vous laver les mains entre l’utilisation de l’alcool à 90 et la collecte de votre graisse de nez.
Attention : pensez à vous laver les mains entre l’utilisation de l’alcool à 90 et la collecte de votre graisse de nez.

Description technique
Une télécommande équipée de trois verins et d’un interrupteur permet de controler la position du bras et la préhension de la pièce métallique à saisir.
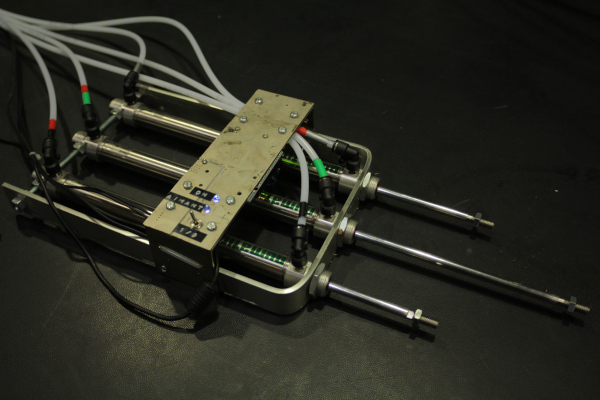
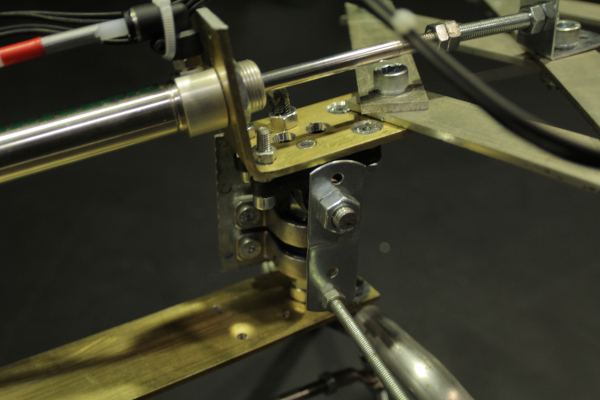
6 tuyaux transmettent la pression au 3 autres verins qui commandent le bras du robot sur 3 axes : tilt, pan et allongement .
Turc est optimisé pour jouer sur un plateau de ~150mm par ~150mm à une hauteur de ~250mm.
Mécanique
Basée sur les transmissions pneumatiques
Electronique
- Arduino UNO
- electroaimant
Software
Améliorations envisagées
- Boules télécommande (vis 8mm)
- Harnais télécommande
