Notes Techniques
Bloc-note technique ou l’on rassemble toute information qui n’a pas sa place dans les fiches individuelles des robots.
Sauf necessité extrême, aucune mise à jour de robot ne devra être faite le jour d'une représentation.
(Loi n°3 de La cellule risques du GRIM)
Les cables <3
indentification des cables : (longueur, couleur du cable, (+couleur du repère))
Longs cables (Standard Grim)
Les longs cables passent par le haut.
- Audio = XLR (+ DI + raccord vers DI)
- Console Midas <–> MS20 (12m, jaune (+bleu))
- Console Midas <–> Godel L (12m, jaune (+vert))
- Multipaire <–> console Midas
- Multipaire <–> micro SM 58 leon (10m, rouge (+vert))
- Multipaire <–> reverb metro DI (15m, rouge (+noir))
- Multipaire <–> boite à rythme TR 808 DI (15m, jaune (+noir))
- Multipaire <–> tt303 DI (?)
- Multipaire <–> Alan vox DI (?)
- Multipaire <–> Alan key DI (?)
- Multipaire <–> Établi micro (?)
- Multipaire <–> Klan DI (?)
- Multipaire <–> Cube Jimi Micro (?)
- Multipaire <–> paper board DI (?)
- Multipaire <–> Echo DI (?)
- Multipaire <–> Café DI (?)
- Reverb <–> Jouet (?)
- Reverb <–> Monotron (?)
- Multipaire <–> Micro Fabien (?)
- HF Sennheiser
- Récepteur <–> Cube Matt
- Eméteur <–> Micro Matt
- Ethernet = RJ45
- Core <–> Alan (25m, blanc)
- Core <–> Lucy (15m, vert)
- Core <–> Godel (15m, vert)
- Core <–> Ottomann (15m, vert)
- Core <–> Ail (10m, bleu)
- Trig/Gate/CV = MiniJack
- Core <–> Modulaire Ber
- Core <–> Fab (15m, noir (+jaune))
- Core <–> Echo (3m, noir (+vert))
- Core <–> Jimi (14m, noir (+bleu))
- Core <–> Foot (14m, noir (+rouge))
Cables courts (Standard Grim)
NON EXHAUSTIF
- Audio = XLR (+ DI + raccord minijack/jack)
- Console Midas <–> Moduber stero 1 et 2 (2m50, rouge)
- Ethernet = RJ45
- Core <–> Core (15cm, rouge) x2
- Trig/Gate/CV = MiniJack
- Core <–> Core
Alims
Plusieurs options possibles pour l’alimentation des robots :
Alimentation secteur.
- Pour robots qui restent en place (Lucy, Alan, Core, etc)
LIPO
- Délicat, fragile, dangeureux mais puissant (pour Mimi)
- Connecteurs XLR 4 broches (+ = pin4 / - = pin1 / femelle = batterie)
LI-ion
- peut=être moins critique que LIPO en termes de de fragilité.
- Connecteurs XLR 4 broches (+ = pin4 / - = pin1 / femelle = batterie)
Piles rechargeables
- faible rendement. Pour HF sennheiser.
5V = USB Power Bank.
- Bon rapport energie/prix
-
Deux gros défauts : Limité à 5V et s’etteind innopinément (voir ci-dessous)
Ça a marché avec certains arduino mais ça ne semble pas très fiable. Problème : ça s’eteind tout seul quand cela détecte une trop faible consomation.
power banks also have some minimal discharge current, and shut off if the discharge current is below this threshold. They treated my Arduino as “leakage” and shut off
2 solutions selon ce thread
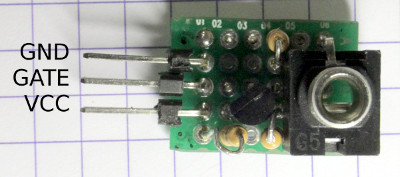
raspberry, arduino, cv et gate.
L’interface raspberry/gate ressemble à ça :
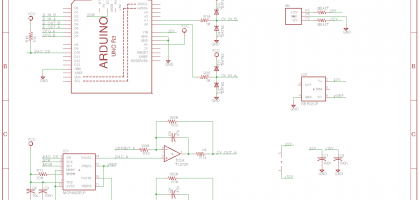
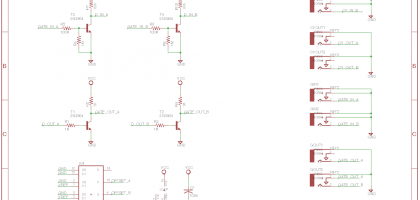
References circuits
Le Git d’un shield pour interfacer modulaires et arduino : Synapse de chez Shaduzlabs
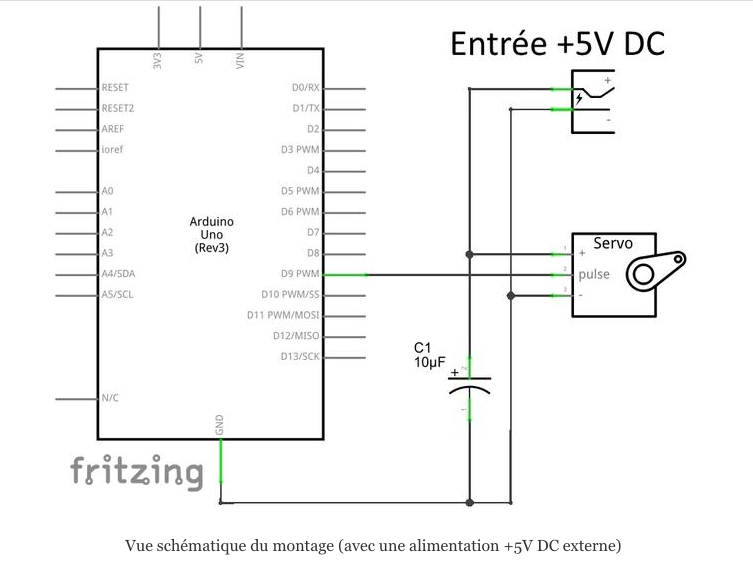
arduino et servomoteur.
arduino et Grains de GinkoSynthèse
Un firmware alternatif Pour le module Grains de GinkoSynthèse qui fait diviseur et multiplicateur de clock
Implantation :
Pot 1/Input 1 Multiplication
Pot 2/Input 2 Division
Pot 3 CCW: Simple ratios (1,2,4,8,16…) Middle pos: Stopped CW: Prime ratios (1,3,5,7,11,13…)
Input 3 Clock in
Out Clock out
bass bot tt 303
mesures miniminimales plateau
Mesures prises à Bessines :
- Profondeur minimale : 6m
- Ouverture minimale : 7,75m
- Hauteur minimale : 3,50m
Réseau
Les machines connectées au réseau :
- Thinkpad de Léon pour Ognon : ottomann.local (10.0.0.2)
- Raspberrypi pour Ognon : ail.local (10.0.0.15)
- Raspberrypi de Fab pour Puredata : godel.local (10.0.0.3)
- Core : core.local (10.0.0.11)
- Lucy : lucy.local (10.0.0.13)
- Alan : alan.local (10.0.0.10)
Ail
Le rpi qui diffuse ognon :
- display est mis en vertical grace à une ligne dans
/boot/config.txt(https://www.raspberrypi.org/forums/viewtopic.php?t=120793) - lance chrome au demarrage grace au contenu de
/home/pi/.config/lxsession/LXDE-pi/autostarthttps://raspberrypi.stackexchange.com/questions/40631/setting-up-a-kiosk-with-chromium
Réglages machines
Jimi
Pendant la création JIMI était accordé en Mi bémol (E♭) Dans les dernières représentations en Ré (D)
Cube rouge
Entrée guitarre (Jimi) :
- Volume 5
- Gain 5
- Ampli Brit Combo 5
- Egaliseur 5, 5, 5
- EFX 10 (tremolo)
- Delay/Reverb 7,5 (Reverb)
Cube noir
Entrée micro-line (Matt)
- Basse,Aigue 0, 10
- Delay 0
- Volume ?
V256 (vocoder)
PRESET REFLEX TUNE
- Bend 10
- Bands 8
- Tone 6.5
- Gender 10
- Pitch 10
- Reflextune
Monotron
- Game 0 (chromatique)
- VCO1 0/7
- xmode 10
- VCO2 10
- Cut 5
- Peak 5
MS20
Morceau cube qui tourne : Ring ou square sustain max attack 5 release 5
Envelop pitch: release 5 prise en compte de l’enveloppe 5
morceau 2 sawtooth octaves 8 et 4 Attack 6
Morceau 3 Pitch 2.8 pour accords attack 0
Réseau
Les trucs à faire en réseau dans le grim
Git pull - Alan
$ ssh grim@alan.local
mot de passe grim@alan = [ALORS ALAN GRIM]
$ cd alan
$ git pull grim develop
mot de passe ssh key = vide
mot de passe git@10.0.0.2 = [GIT LÉON]